CADSM
Example
Assemblies
by
Aik-Siong Koh
curriculum
vitae (resume)
askoh@cadsm.com
http://www.cadsm.com
Page updated: 2005/03/24
|
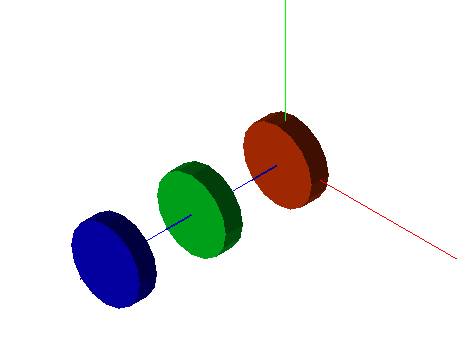
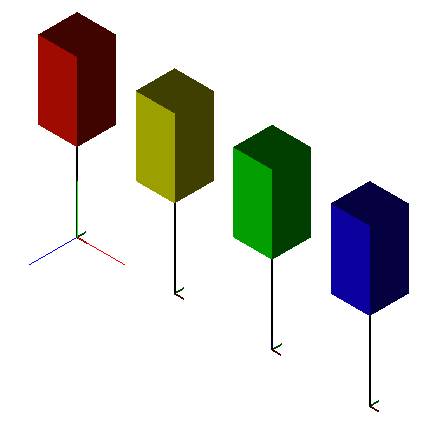
Two bodies projected in different directions. |
||||
|
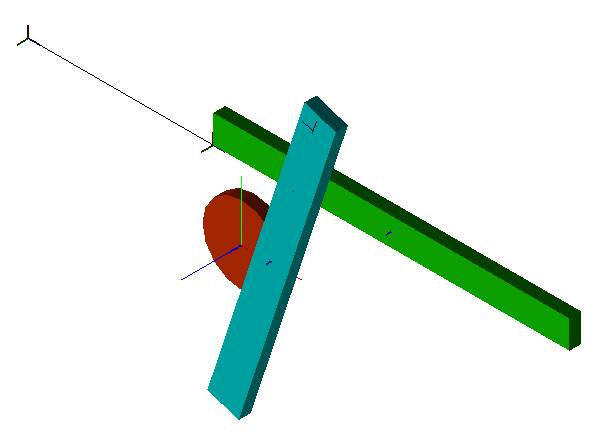
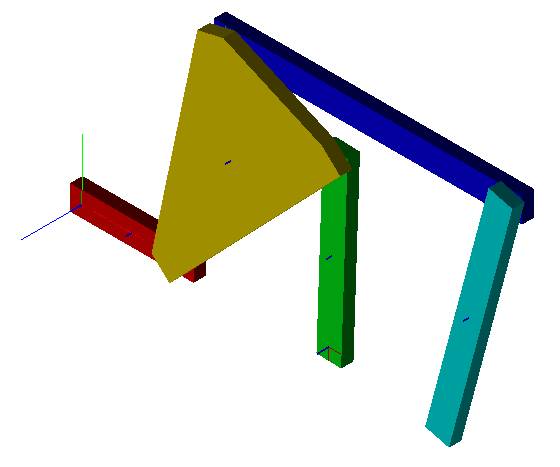
Two beams rotated in different planes. |
||||
|
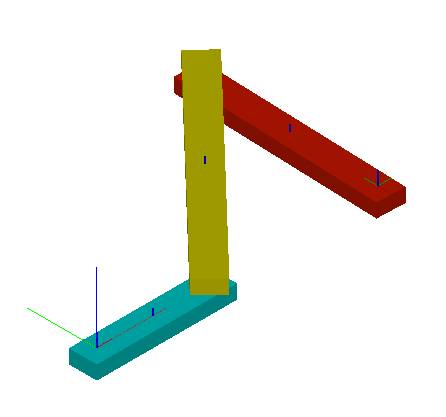
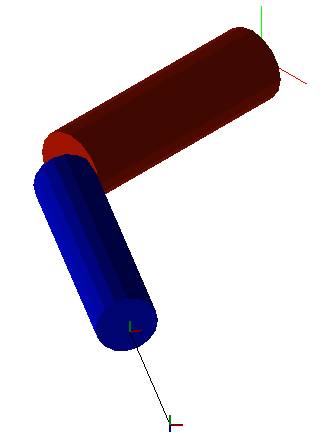
A beam rotating relative to another rotating beam. |
|
|
||
|
A single pendulum and a double pendulum in plane motion. |
|
|
||
|
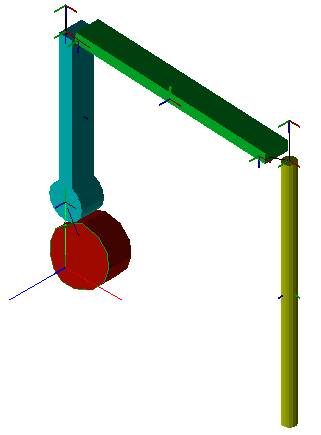
A circular pendulum and a double circular pendulum in motion. |
||||
|
A four bar mechanism. |
||||
|
A piston crank mechanism. |
||||
|
A sdof and a 2dof spring mass systems. |
||||
|
A cantilever beam approximated by links and torsional springs. |
|
|||
|
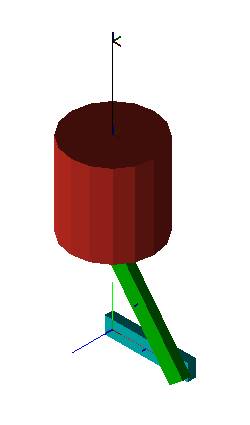
A spinning cylinder pinned at one end and allowed to precess and nutate. |
||||
|
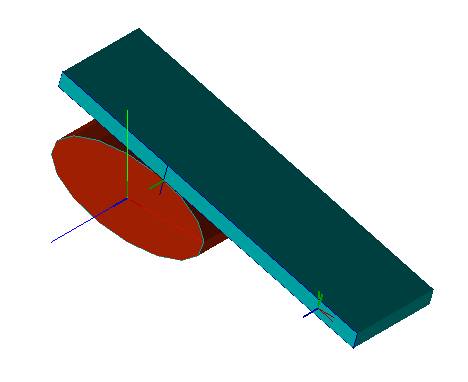
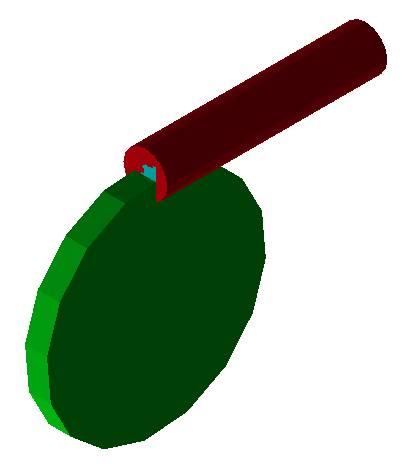
A follower beam resting on an elliptic cam. |
||||
|
A quick return mechanism. |
|
|||
|
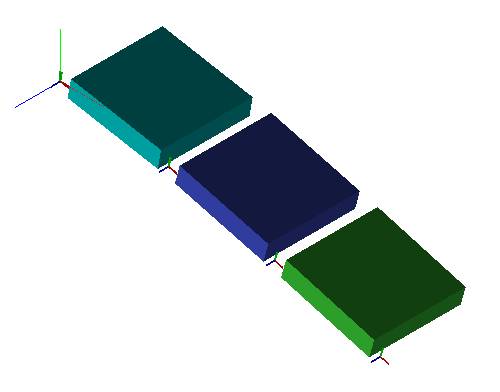
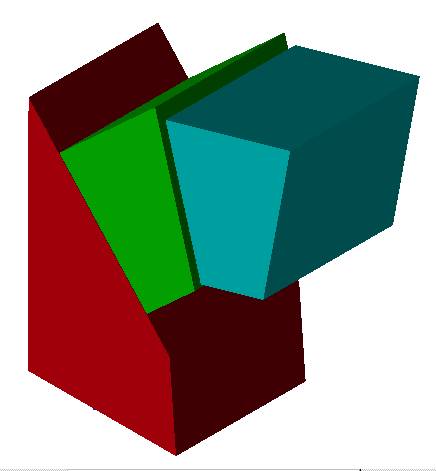
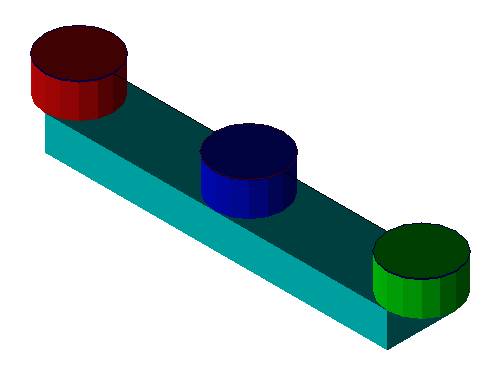
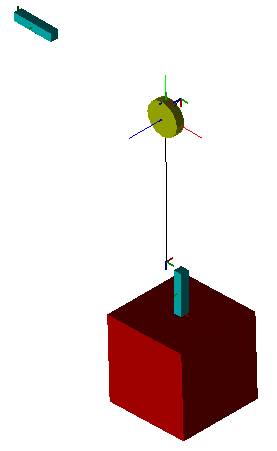
Three prismatic blocks stacked and rotating with respect to each other. |
||||
|
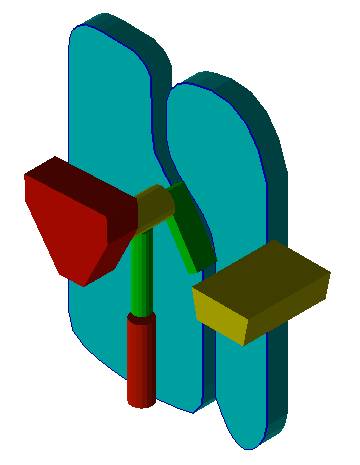
Cam, follower, rocker and plunger combination. |
|
|||
|
A rack and pinion combined with a screw example. |
|
|
||
|
Transmission of a constant angular velocity at an angle from the input rotation. |
|
|||
|
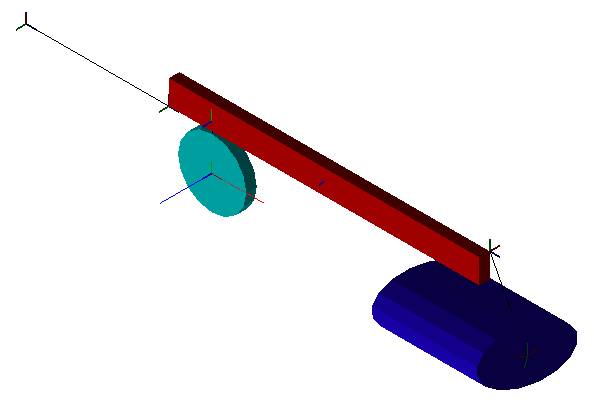
Sliding puck on a see saw impacting stops at the ends. |
|
|||
|
Backhoe arm, forearm and bucket. |
||||
|
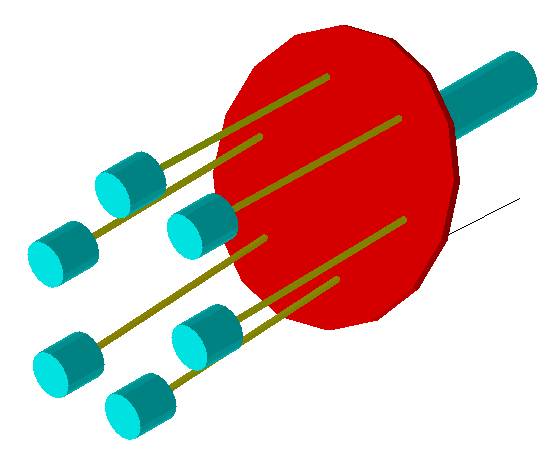
Wobble pump with six cylinders. |
|
|
||
|
McPherson strut front suspension. |
||||
|
Watt I six-bar linkage. |
|
|
||
|
Watt II six-bar linkage. |
|
|
||
|
Stephenson I six-bar linkage. |
|
|
||
|
Stephenson II six-bar linkage. |
|
|
||
|
Stephenson III six-bar linkage. |
|
|
||
|
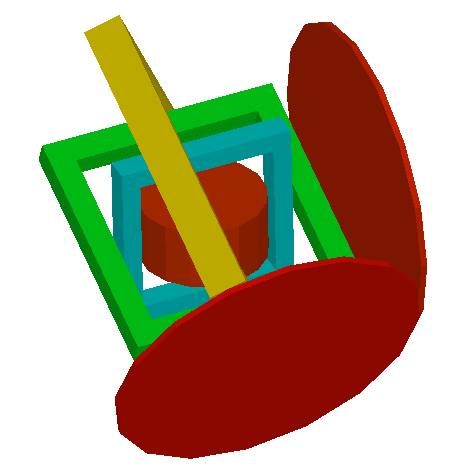
Satellite reaction wheel consisting of gyro, gimbles and gears. By Arved Deecke. |
|
|||
|
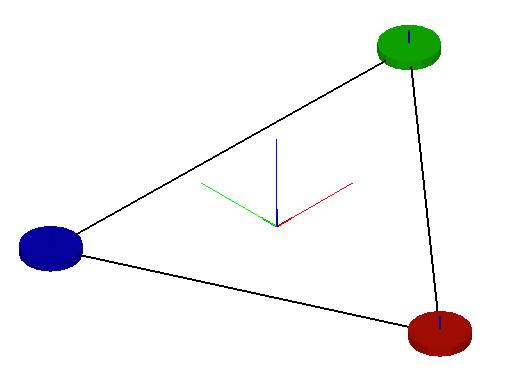
Three body problem with inverse square law. |
|
|
||
|
Projectile with aerodynamic drag. |
|
|||
|
Uniform light beam fixed at one end and carrying an eccentric mass at the other. |
|
|||
|
Duffing oscillators (cubic nonlinearity) varying from harmonic to chaotic response. |
|
|||
|
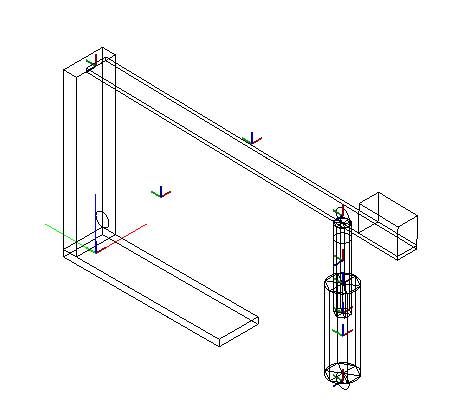
A ladle lifted by a hydraulic jack and tipped by a pin running in a curved slot. By Don Ramsden. |
|
|
||
|
A worm gear example. |
|
|
||
|
A pulley example. |
|
|||
|
A spur gear example. |
|
|
||
|
A barge lowering a topdeck onto the jacket legs of an oil platform. |
|
|||
|
A barge carrying a topdeck colliding with the jacket legs due to wave action. |
|
|
||
|
CADSM animating the MOSES simulation data of a floatover like above. |
|
|
||
|
Motion simulation using DXF file import of a hydraylic ramp drawing. |
||||
|
Motion simulation using DXF file import of a tree drawing. |
||||
|
Inverse kinematics of a 6 axis articulated robot moving a cylinder. |
||||
|
A double wishbone suspension system. |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}